

Grupa Badawcza Nowych Technologii w Motoryzacji
Grupa Badawcza Nowych Technologii w Motoryzacji to interdyscyplinarny zespół, zdolny do podejmowania złożonych i nietypowych wyzwań technicznych oraz realizowania projektów badawczo-rozwojowych z pogranicza m.in. konstrukcji, elektrotechniki, napędów, sztucznej inteligencji oraz oprogramowania pojazdów.
 BUDOWA OPROGRAMOWANIA
BUDOWA OPROGRAMOWANIA PROJEKTOWANIE
PROJEKTOWANIE PROTOTYPOWANIE
PROTOTYPOWANIE BADANIA INŻYNIERSKIE
BADANIA INŻYNIERSKIE
- Autonomizacja robotów/pojazdów
- Elektryfikacja pojazdów
- Środowiska symulacyjne
- Systemy wizyjne
- Aplikacje mobilne i interfejsy sterowania
- Systemy gromadzenia danych
- Stanowiska badawcze
Oferujemy:
- Zaprojektowanie rozwiązania automatyzacji odpowiedniego do założonych warunków środowiskowych i procesów
- Przygotowywanie oprogramowania dla pojazdów/robotów z wykorzystaniem środowiska ROS/ROS2
- Opracowywanie oraz implementacjęa algorytmów odpowiedzialnych za: mapowanie, planowanie ścieżki, lokalizację, wykrywanie i identyfikację obiektów
- Przygotowywanie oprogramowania do zarządzania flotą pojazdów/robotów autonomicznych
- Integracja komponentów takich jak: lidary, kamery światła dziennego, kamery stereo, kamery termowizyjne, nawigacja satelitarna, nawigacja inercyjna, enkodery itp. wraz z implementacją odpowiedniego oprogramowania
- Tworzenie i optymalizacja algorytmów omijania przeszkód i unikania kolizji w czasie rzeczywistym.
Wykorzystywane narzędzia: ROS/ROS2, C++, Python, Linux
Przykładowe realizacje:
- System autonomii dla Platformy Autonomicznej Wsparcia Operacyjnego
- System autonomicznego ominięcia nagle pojawiającej się przeszkody, w tym implementacja modułu sterowania, systemów wizyjnych oraz sensorów w pojeździe
- System autonomii dla pojazdów w środowisku przemysłowym wraz z modułem zarządzania flotą


Oferujemy:
- Programowanie sterowników pojazdowych np. Kibes, Ecotron
- Tworzenie kompletnego oprogramowania do sterowników nadrzędnych prototypowych pojazdów
- Testy Software-In-the-Loop w środowisku Matlab&Simulink
Wykorzystywane narzędzia: Matlab&Simulink, Vector
Przykładowe realizacje:
- PAWO
- REEVAN


Oferujemy:
- Budowę środowisk symulacyjnych w celu testowania oprogramowania robotów/pojazdów autonomicznych .
- Budowę środowisk symulacyjnych generujących dane syntetyczne do trenowania sieci neuronowych
- Odwzorowywanie rzeczywistych przypadków testowych w symulacji
- Budowę bliźniaków cyfrowych
- Symulacja różnych warunków oświetleniowych i atmosferycznych
Wykorzystywane narzędzia: Unity 3D, C#, Linux
Przykładowe realizacje:
- Symulacja zautomatyzowanej bezzałogowej platformy lądowej odzwierciedlająca rzeczywisty pojazd dla w różnych warunkach terenowych
- Symulacja otoczenia hal produkcyjnych wraz z zasymulowanym miejscem załadunku, rozładunku oraz ładowania platform autonomicznych
- Środowisko symulacyjne do generacji danych syntetycznych spinek samochodowych
Oferujemy:
- Budowa oprogramowania do obsługi komponentów systemów wizyjnych: kamery światła dziennego, kamery termowizyjne, kamery stereo, a także czujników takich jak lidary, radary
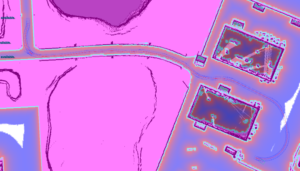
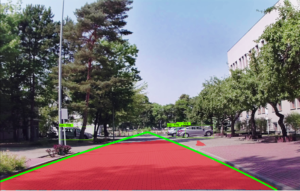
- Przygotowanie oprogramowania do fuzji danych z wybranych czujników Budowa oraz implementacja sieci neuronowych odpowiedzialnych m.in. za wykrywanie i identyfikację obiektów w postaci etykiet 2D/3D, semantyczne segmentowanie obrazu, panoptyczne segmentowanie obrazu
- Integracja systemów wizyjnych z systemami automatyki oraz robotyki.
- Opracowanie algorytmów analizy obrazu w czasie rzeczywistym, wspomagających m.in. autonomiczne pojazdy, systemy bezpieczeństwa, monitorowanie produkcji.
Wykorzystywane narzędzia: PyTorch, TensorFlow, Python, C++, Linux, OpenCV, ROS, CUDA
Przykładowe realizacje:
- Fuzja danych z lidaru i kamery pozwalająca określić odległość do wykrytego obiektu
- Wykrywanie i identyfikacja obiektów z kamery światła dziennego i kamery termowizyjnej
Oferujemy:
- Budowanie aplikacji mobilnych dla systemów Android/iOS
- Integracja aplikacji mobilnych z usługami chmurowymi
- Wykorzystanie sieci neuronowych w aplikacjach mobilnych
- Budowa interfejsów zdalnego sterowania pojazdami/robotami
Wykorzystywane narzędzia: Dart, Flutter PyTorch, Python, AWS, Android
Przykładowe realizacje:
- Aplikacja mobilna do wykrywania identyfikacji części samochodowych z wykorzystaniem AI
- Interfejs sterownika bezzałogowym pojazdem lądowym
Oferujemy:
- Budowania statycznych oraz mobilnych systemów gromadzenia danych rzeczywistych z wykorzystaniem m.in. lidarów, kamer, radarów, nawigacji satelitarnej, nawigacji inercyjnej, stacji pogodowych i innych
- Przygotowanie oprogramowania do automatycznego etykietowania danych rzeczywistych z wykorzystaniem AI
- Budowę systemów gromadzenia danych syntetycznych z uwzględnieniem implementacji dowolnego otoczenia, warunków pogodowych oraz oświetleniowych
Wykorzystywane narzędzia: Unity 3D, ROS/ROS2, PyTorch, C++, C#, Python
Przykładowe realizacje:
- System zbierania danych dla pojazdu osobowego
- Generator danych syntetycznych pochodzących z kamer
Oferujemy:
- Projektowanie i modyfikowanie kompletnych stanowisk badawczych
- Tworzenie układów sterowania do nowych i istniejących stanowisk badawczych
- Tworzenie oprogramowania sterującego pracą stanowisk badawczych
Wykorzystywane narzędzia: SolidWorks, ZUKEN, HyperWorks, LabView
Przykładowe realizacje:
- Stanowisko do badań ogniw i modułów elektrochemicznych
- Stanowisko do badań pasów bezpieczeństwa

- Części pojazdów
- Pojazdy specjalne
- Naczepy i przyczepy
- Stanowiska badawcze
- Wiązki elektryczne
- Magazyny energii
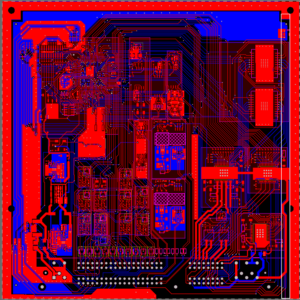
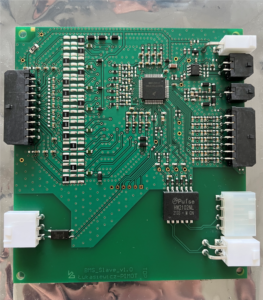
- Projektowanie PCB
- Układy napędowe
Oferujemy:
- Projektowanie układów zawieszenia, ustrojów nośnych, układów przeniesienia napędu, urządzeń zabezpieczajacych
- Weryfikacja założeń konstrukcjach w środowiskach symulacyjnych
Wykorzystywane narzędzia: SolidWorks, HyperWorks
Przykładowe realizacje:
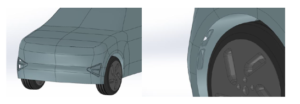
- Integracja kabiny pojazdu oraz zawieszenia z ramą do pojazdu kat N1
- Platformy dla pojazdów elektrycznych kat M1
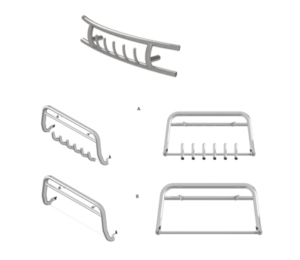
- Zderzak przedni i tylny pojazdu kat M1 z uwzględnieniem redukcji oporów aerodynamicznych



Oferujemy:
- Kompleksowe projektowanie pojazdów z uwzględnieniem specjalistycznych wymagań
- Projektowanie zabudów specjalnych
- Weryfikacja założeń konstrukcjach w środowiskach symulacyjnych
Wykorzystywane narzędzia: SolidWorks, ZUKEN, HyperWorks
Przykładowe realizacje:
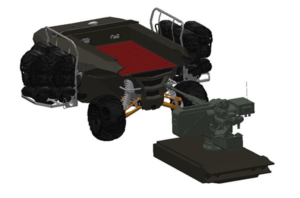
- Trójkołowy pojazd specjalny dla osób niepełnosprawnych - Pojazd Pi
- Pojazd specjalny o zwiększonych możliwościach terenowych – FUNTER 4x4x4
- Platforma Autonomicznego Wsparcia Operacyjnego - PAWO



Oferujemy:
- Projektowanie naczep i przyczep zgodnie z wymaganiami homologacyjnymi
- Personalizacja projektu pod wymagania klienta
- Projektowanie przyczep i naczep specjalnego zastosowania
Wykorzystywane narzędzia: SolidWorks, Zuken, HyperWorks
Oferujemy:
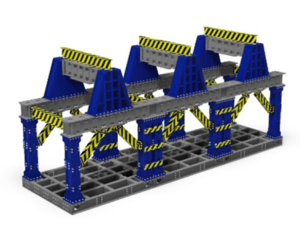
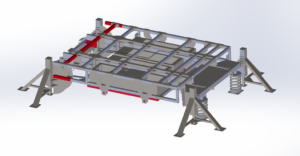
- Projektowanie stanowisk badawczych
- Weryfikację symulacyjną wytrzymałości i kinematyki stanowiska z uwzględnieniem obciążeń eksploatacyjnych
Wykorzystywane narzędzia: SolidWorks, ZUKEN, HyperWorks, LabView
Przykładowe realizacje:
- Stanowiska do badań ogniw i modułów elektrochemicznych (QBat)
- Stanowisko do badań dynamicznych pojazdów i zabudów
- Stanowisko do badań dynamicznych baterii (BLB)
- Stanowisko modułowe do badań zmęczeniowych konstrukcji
- Stanowisko do badania systemu wymiany baterii w pojazdach dostawczych


Oferujemy:
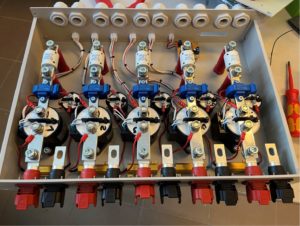
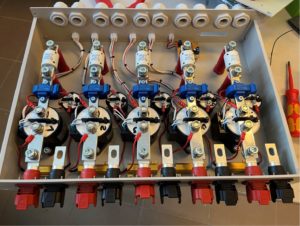
- Projektowanie wiązek elektrycznych do pojazdów wszystkich kategorii
- Projektowanie wiązek instalacji HV pojazdów elektrycznych i hybrydowych
- Projektowanie i prototypowanie jednostek dystrybucji energii (PDU) do pojazdów elektrycznych i hybrydowych
Wykorzystywane narzędzia: Zuken e3.series, Matlab&Simulink,
Przykładowe realizacje:
- PAWO
- REEVAN

Oferujemy:
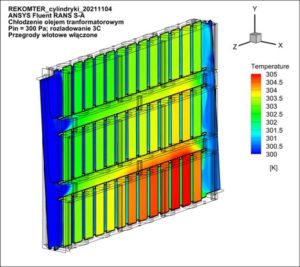
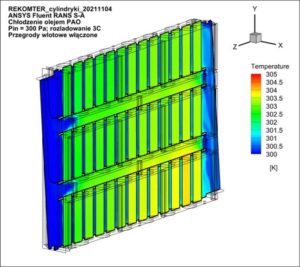
- Kompleksowe projektowanie magazynów energii do pojazdów i zastosowań stacjonarnych z uwzględnieniem specjalistycznych wymagań
- Wyznaczanie parametrów magazynów energii w zależności od aplikacji
- Dobór ogniw elektrochemicznych lub modułów ogniw do budowy magazynu
- Wykonanie prototypów i przeprowadzenie testów
- Kompleksowe wsparcie w certyfikacji i procesie wprowadzania produktu na rynek
Wykorzystywane narzędzia: Matlab&Simulink, Zuken e3.series, Altium Designer, dSpace, SolidWorks, HyperWorks
Przykładowe realizacje:
- PAWO
- Rekomter




Oferujemy:
- Tworzenie schematów elektrycznych na podstawie specyfikacji
- Projektowanie zaawansowanych wielowarstwowych obwodów drukowanych PCB
- Projektowanie zgodnie z uwzględnieniem zasad EMC
- Testowanie systemów zarządzania baterią (BMS) na stanowisku do testów Harware-In-the-Loop
Wykorzystywane narzędzia: Altium Designer, dSpace
Przykładowe realizacje:
- System zarządzania baterią (BMS)
- Sterownik nadrzędny pojazdu (VCU)



Oferujemy:
- Wyznaczenie parametrów układu napędowego na podstawie założeń pojazdu
- Dobór komponentów z rynku
- Integrację komponentów w kompletne układy napędowe, integrację układów z pojazdem, testy uruchomieniowe i funkcjonalne
Wykorzystywane narzędzia: Matlab&Simulink, LabVIEW, układy akwizycji danych firmy National Instruments
Przykładowe realizacje:
- Autoelektrosan
- REEVAN
- PAWO



- Prototypowanie pojazdów
- Wykonywanie stanowisk badawczych
- Frezowanie CNC
- Druk 3D
Oferujemy:
- Integrację mechaniczną, elektryczną i teleinformatyczną komponentów i podzespołów
- Wykonywanie dedykowanych elementów montażowych, obudów itp.
- Przeprowadzenie testów uruchomieniowych układów napędowych
- Wykonanie prototypu pojazdu
Wykorzystywane narzędzia: tokarki i frezarki konwencjonalne, frezarka CNC, spawanie MIG/MAG i TIG
Przykładowe realizacje:
- Trójkołowy pojazd specjalny dla osób niepełnosprawnych - Pojazd Pi
- Pojazd specjalny o zwiększonych możliwościach terenowych – FUNTER 4x4x4
- Platforma Autonomicznego Wsparcia Operacyjnego - PAWO

Oferujemy:
- Projektowanie i modyfikowanie kompletnych stanowisk badawczych
- Tworzenie układów sterowania do nowych i istniejących stanowisk badawczych
Wykorzystywane narzędzia: tokarki i frezarki konwencjonalne, frezarka CNC, spawanie MIG/MAG i TIG
Przykładowe realizacje:
- Stanowisko do badań dynamicznych pojazdów i zabudów
- Stanowisko do badań dynamicznych baterii
- Stanowisko modułowe do badań zmęczeniowych konstrukcji
- Stanowisko do badania systemu wymiany baterii w pojazdach dostawczych

Oferujemy:
- Frezowanie CNC 3-osiowe
- Możliwość obróbki przy wykorzystanie dodatkowej 4 osi
- Przygotowanie technologii obróbki w programie CAM
Wykorzystywane narzędzia: Frezarka CNC Haas VF-2, SolidCAM
Przykładowe realizacje:
- Obudowa do sterownika nadrzędnego pojazdu (VCU)


Oferujemy:
- Druk3D w technologii FDM elementów w maksymalnym gabarycie 700x700x1700 [mm]
- Druk3D na podstawie geometrii CAD
- Konsultacje w zakresie poprawności druku 3D
Wykorzystywane narzędzia: Builder Extreme 2000 PRO, Zortrax M200 Plus, HBOT 3D F300
Przykładowe realizacje:
- Poszycie pojazdu trójkołowego dla osób niepełnosprawnych (Pojazd Pi)
Mocowania czujników do pojazdu autonomicznego 

- Badania ogniw i baterii elektrochemicznych
- Badania pojazdów elektrycznych
- Badania symulacyjne kinematyki i dynamiki pojazdów
- Badania symulacyjne wytrzymałości konstrukcji
- Skanowanie 3D i inżynieria odwrotna
Oferujemy:
- testy elektryczne
- badania środowiskowe w komorach temperaturowych (od –40 do 180°C)
- badania trwałości cyklicznej ogniw
- badania z użyciem dowolnych cykli obciążenia prądowego i temperaturowego.
Wykorzystywane narzędzia: komory temperaturowe Binder, zasilacze dwukierunkowe ITECH, rejestratory temperatur, mierniki rezystancji (DC i AC), kamery temowizyjne.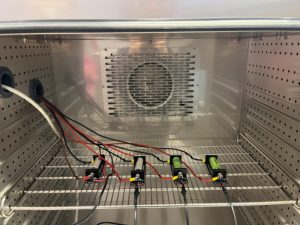
Oferujemy:
- badania pojazdów kategorii L, M1 i N1 na hamowni podwoziowej: pomiar momentu obrotowego i mocy na kołach napędowych pojazdu, pomiar zużycia energii, diagnostyka układu napędowego pod obciążeniem
- badania pojazdów wszystkich kategorii na poligonie: badania dynamiczne, pomiar zużycia energii, wyznaczanie charakterystyk trakcyjnych i dynamicznych.
Wykorzystywane narzędzia: hamownia podwoziowa Schenck-KOMEG, układ akwizycji danych National Instruments, LabVIEW, Matlab
Przykładowe realizacje:
- badania zużycia energii autobusu elektrycznego w cyklach SORT
- wyznaczanie charakterystyk trakcyjnych i energetycznych pojazdu kat. N1
Oferujemy:
- Badania symulacyjne (MBD) ruchu pojazdów i mechanizmów
- Określanie odpowiedzi dynamicznych układu na wymuszenie zewnętrzne
- Określanie sił w parach kinematycznych na podstawie symulacji
Wykorzystywane narzędzia: HyperWorks: Motionsolve
Przykładowe realizacje:
- Ocena zwrotności i kierowalności trzyosiowego autobusu
- Analiza sił w układach kinematycznych trójkołowego pojazdu specjalnego dla osób niepełnosrawnych
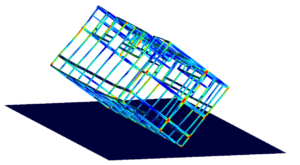
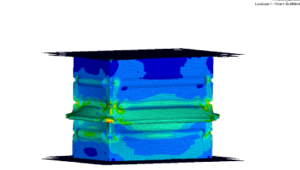
Oferujemy:
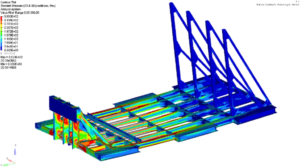
- Analizy MES statycznych obciążeń konstrukcji
- Analizy MES obciążeń dynamicznych, w tym ocena bezpieczeństwa biernego
- Analizy zmęczeniowe konstrukcji
- Opracowanie modeli symulacyjnych pojazdów i konstrukcji
- Przeprowadzanie badań na zgodność z wybranymi regulaminami homologacyjnymi metodami symulacyjnymi
Wykorzystywane narzędzia: HyperWorks: Opitistruct i RADIOSS, ANSYS: LS-Dyna
Przykładowe realizacje:
- Ocena wytrzymałości konstrukcji nośnej autobusu
- Ocena wytrzymałości sprzęgu kadłuba autobusu z przyczepą
- Analiza pochłaniania energii przez absorbery zderzenia czołowego
- Ocena wytrzymałości mocowań baterii trakcyjnej w pojeździe kat. M
- Analiza sztywności i nośności ramy pojazdu
- Ocena trwałości ustroju nośnego pojazdu specjalnego

Oferujemy:
- Skanowanie 3D obiektów przy wykorzystaniu ręcznego skanera laserowego
- Pomiar detali w oparciu o skan 3D
- Usługi Inżynierii odwrotnej – opracowanie modelu CAD na postawie obiektu lub skanu
Wykorzystywane narzędzia: Shining 3D FREESCAN UE11, Geomagic Design X
Przykładowe realizacje:
- Inżynieria odwrotna przyczepek lekkich
- Pomiar gabarytu pojazdu kategorii N2