Automation and autonomization of transport
Customer Service Department

Transportation automation involves the development of technologies that enable autonomous or semi-autonomous operation of vehicles and systems that support operators and drivers. Our work includes research, development and integration of vehicle autonomy systems, ADAS systems and simulation environments used to design and test modern transportation solutions.
Our activities cover the entire system development process – from algorithm design and sensor integration, to simulation and data generation, to real-world experimental testing.
Development of autonomy systems
Development of autonomy systems
We are conducting research and development work on autonomous driving systems and driver and operator assistance systems. These include both software development and integration of hardware components into test vehicles.
Scope of work:
- implementation of autonomous driving functions
- global and local vehicle localization
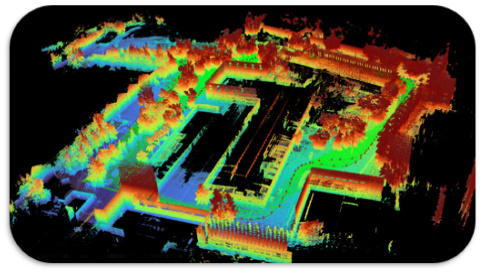
- mapping and 3D mapping of the environment
- global and local path planning
- control of vehicle actuators
- Filtering and fusion of data from multiple sensors
- detection and tracking of objects
- systems of following the operator (follow-me)
- Lane keeping systems and other autonomy features
The work also includes the development of testing platforms to implement and test autonomy algorithms in real vehicles.
Integration and implementation of autonomy systems
Integration and implementation of autonomy systems
The process of implementing autonomous systems includes both the preparation of software and the selection and configuration of hardware components.
Implemented activities:
- selection of autonomy systems components
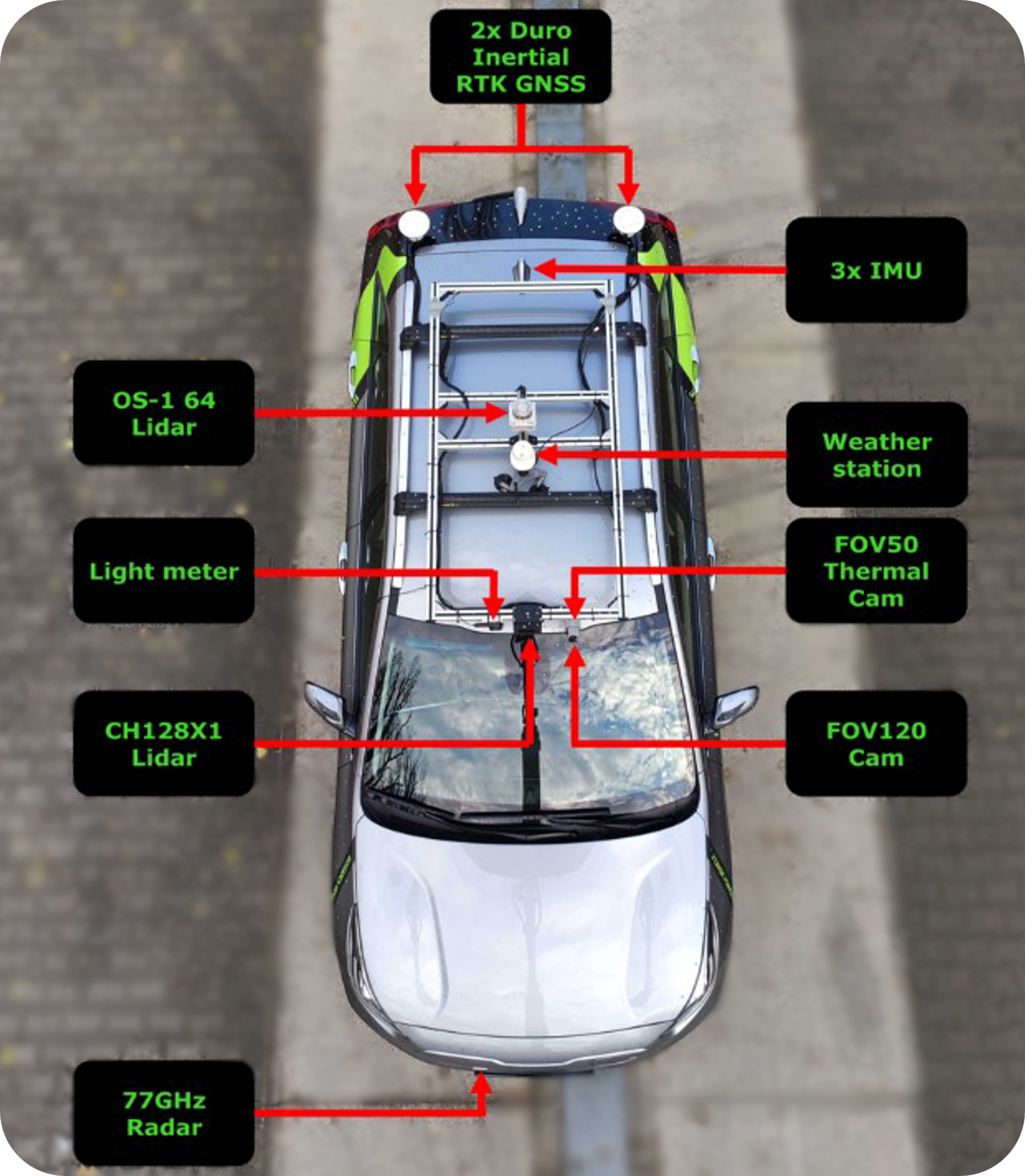
- Integration of lidar, radar, cameras and navigation systems
- implementation of autonomy algorithms
- preparation of control interfaces
- Integration with fleet management systems
- Integration and testing in simulation and real environment
- construction of data collection systems
- acquisition of actual and synthetic data
The work also includes sensor calibration and configuration of all system components in the vehicle.
Development of simulation environments
Development of simulation environments
Simulation environments allow safe testing of autonomy algorithms even before they are implemented in real vehicles. The simulations created replicate both the vehicles and their real-world environment.
Functionality of simulation environments
- mapping of the real road environment
- simulation of traffic participants
- simulation of vehicle sensors and infrastructure
- mapping of weather and lighting conditions
- simulation of automated vehicle traffic
- implementation of various test scenarios
- Integration of simulation with ROS and ROS2 systems
This makes it possible to test autonomy algorithms under realistic conditions even before they are implemented in test vehicles.
Generating synthetic data
Generating synthetic data
Simulation environments are also being developed to generate synthetic data used in learning AI systems.
Scope of work:
- generating synthetic data for perception systems
- automatic data labeling
- generation of 2D labels and semantic masks
- introducing randomness into the simulation parameters (weather, lighting, textures, shapes)
- modification of the parameters of the simulation environment
Data prepared in this way makes it possible to significantly speed up the process of training artificial intelligence algorithms.
Systems based on artificial intelligence
Systems based on artificial intelligence
We are developing solutions using artificial intelligence methods to analyze sensory data and interpret the vehicle’s environment.
Main areas of work:
- Detection and identification of objects using cameras and lidar
- Object recognition with fusion of data from multiple sensors
- Semantic and panoptic segmentation of the road scene
- analysis of data from thermal imaging cameras
- semi-automatic labeling of training data
- Use of natural language in vehicle and robot management systems
Implementation of autonomy systems in vehicles
Implementation of autonomy systems in vehicles
The developed solutions are being implemented in real research platforms and experimental vehicles.
Scope of work:
- Implementation of autonomous functions in passenger vehicles
- Implementation of autonomy systems in unmanned vehicles
- Integration of systems in off-highway vehicles
Areas of application
- security and defense
- industry 4.0
- agriculture 4.0
- autonomous systems in logistics and transportation
Research on ADAS and vehicle autonomy systems
Research on ADAS and vehicle autonomy systems
We conduct research on driver assistance and autonomous systems in both simulation and real-world environments.
Types of research:
- research in a virtual environment
- tests under near real conditions (simulated road scenarios)
- tests in real traffic
Examples of systems studied:
- automatic emergency braking (AEBS)
- collision warning system
- Lane keeping assist (LKA / LDWS).
- emergency management systems
- adaptive cruise control
- intelligent speed adjustment systems
Research is conducted in accordance with applicable regulations and standards, including but not limited to:
- UN regulations
- EU regulations
- Euro NCAP protocols
- SAE standards
- ISO standards
- General Safety Regulation
- Law on Road Traffic
- manufacturers’ methods.
Research infrastructure and equipment
Research infrastructure and equipment
Specialized measurement infrastructure and research platforms are used to carry out the research.
Research equipment:
- Soft targets (passenger car, pedestrian, cyclist, child, motorcyclist)
- self-propelled platforms (UFOpro, UFOmicro)
- steering robot
- pedal control robots
- satellite-interface systems
Sensory Systems:
- lidars
- radars
- RGB cameras and stereo cameras
- thermal imaging cameras
- GNSS
- IMU
Test platforms
- test platform for systems testing under road conditions
- UGV autonomous platform (PAWO) – unmanned wheeled platform
- Sensor kits for collecting data from roads.